
러닝머신 하는 K-공대생
Monocular Depth Estimation 본문
마스크된 이미지를 real world에 매핑하기 위해 Depth 정보가 필요하다. Depth 정보를 이전 시도에는 RGB-d 카메라를 활용했는데 이런 외부 장치없이 앱개발을 진행해야하므로 Mono Camera 만을 활용해 Depth Map을 얻어내야한다. 아래는 괜찮다고 생각되는 mono camera부터 Depth를 얻는 방식 2개이다. 같은 연구소에서 만들어졌는데 오늘은 ICCV2019에 나온 논문을 이용하여 numpy 형태의 depth map을 얻어보았다.
참고 문헌:
https://github.com/nianticlabs/monodepth2
GitHub - nianticlabs/monodepth2: [ICCV 2019] Monocular depth estimation from a single image
[ICCV 2019] Monocular depth estimation from a single image - GitHub - nianticlabs/monodepth2: [ICCV 2019] Monocular depth estimation from a single image
github.com
https://github.com/nianticlabs/wavelet-monodepth
GitHub - nianticlabs/wavelet-monodepth: [CVPR 2021] Monocular depth estimation using wavelets for efficiency
[CVPR 2021] Monocular depth estimation using wavelets for efficiency - GitHub - nianticlabs/wavelet-monodepth: [CVPR 2021] Monocular depth estimation using wavelets for efficiency
github.com
결과:
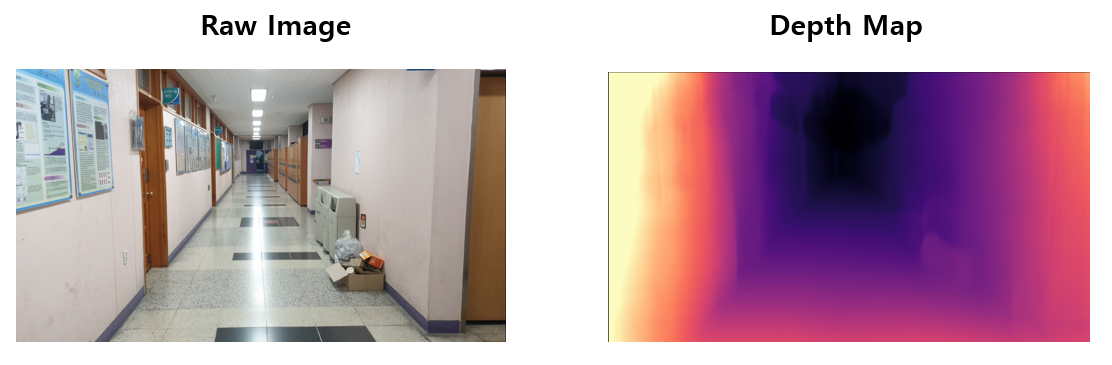
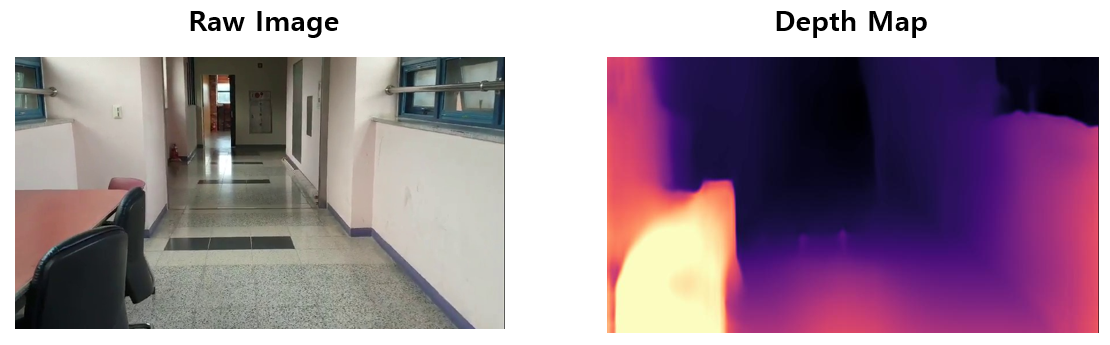
+ 추가적으로 이에 10개의 데이터셋(ReDWeb, DIML, MegaDepth 등) 에 대해 학습된 MiDaSv2 모델(midas_v21_small)[6] 로 대체하였으며 더욱 선명한 depth map을 얻었다. 아래 그림은 순서대로 원본, monodepth2, midas 의 경우이다.

'Machine Learning' 카테고리의 다른 글
| Pygame 을 이용한 딥러닝 모델 시각화 툴 개발 (2) | 2021.12.26 |
|---|---|
| [XAI Reading Log] The All Convolutional Net #1 (0) | 2021.09.09 |
| [XAI Reading Log] Layer-Wise Relevance Propagation #2 (1) | 2021.09.02 |
| [XAI Reading Log] Layer-Wise Relevance Propagation #1 (2) | 2021.08.26 |
| Convolutional Neural Network, 그 내부를 보다 (2) | 2021.07.28 |



